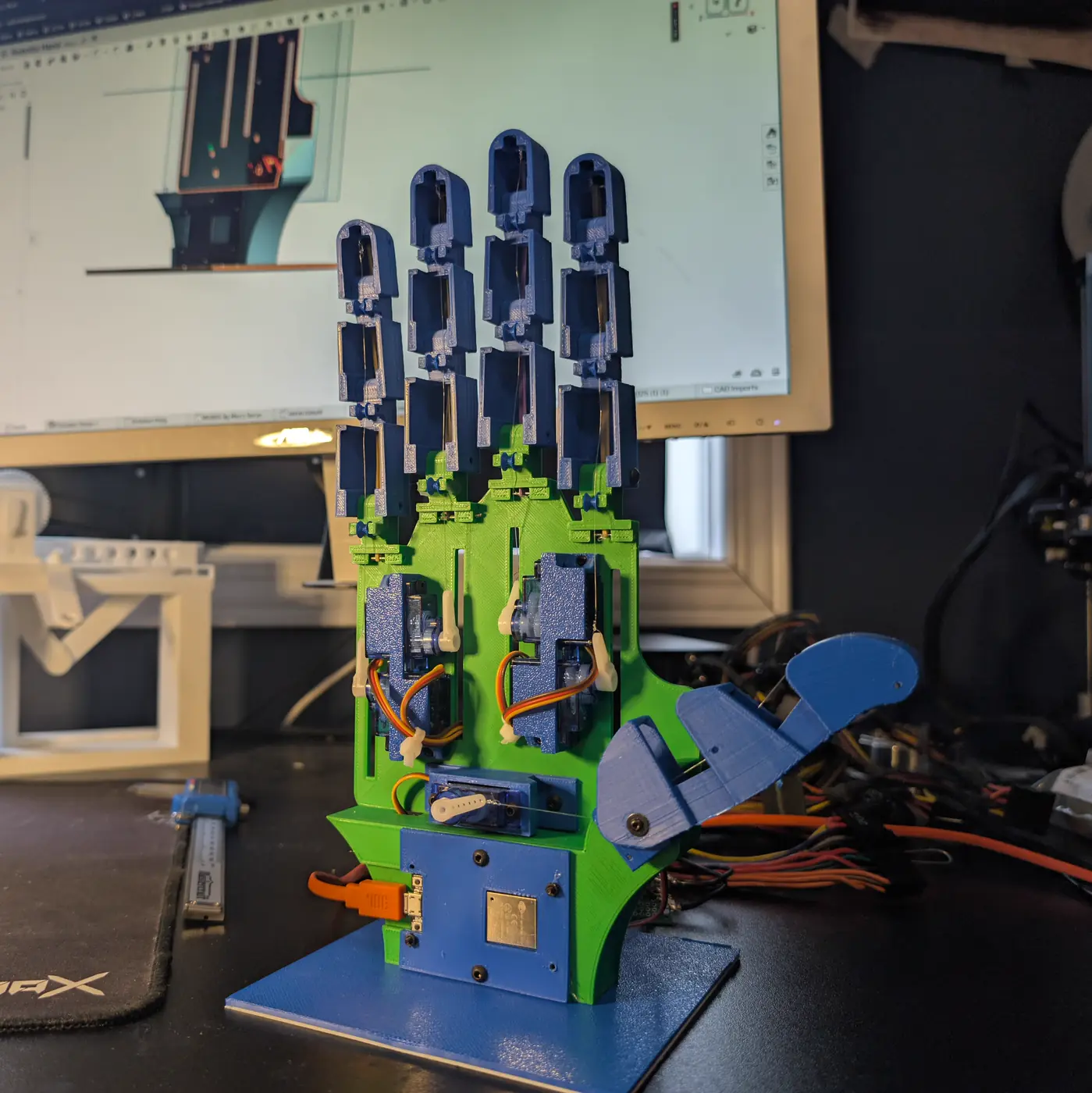
5-DOF Robotic Hand
Gesture-controlled hand powered by an ESP32-WROOM. Python + OpenCV/MediaPipe reads my webcam and streams joint targets to the arduino.
Designed the whole hand: palm, joints, pulleys, housings, Bowden tendons. Print-in-place fingers. MediaPipe tracks joints and streams angles to an Arduino mapping each finger to servo targets.
Self-Balancing Boxing Robot
A self-balancing robot that mirrors human arm motion to physically box another robot in real time.
• Simplified dynamic model for design + control • Arm angles mapped to my arms using accelerometers • PID loop for balance and tilt • Feedforward wheel torque from arm motion • Deriving dynamics with rigid-body mechanics
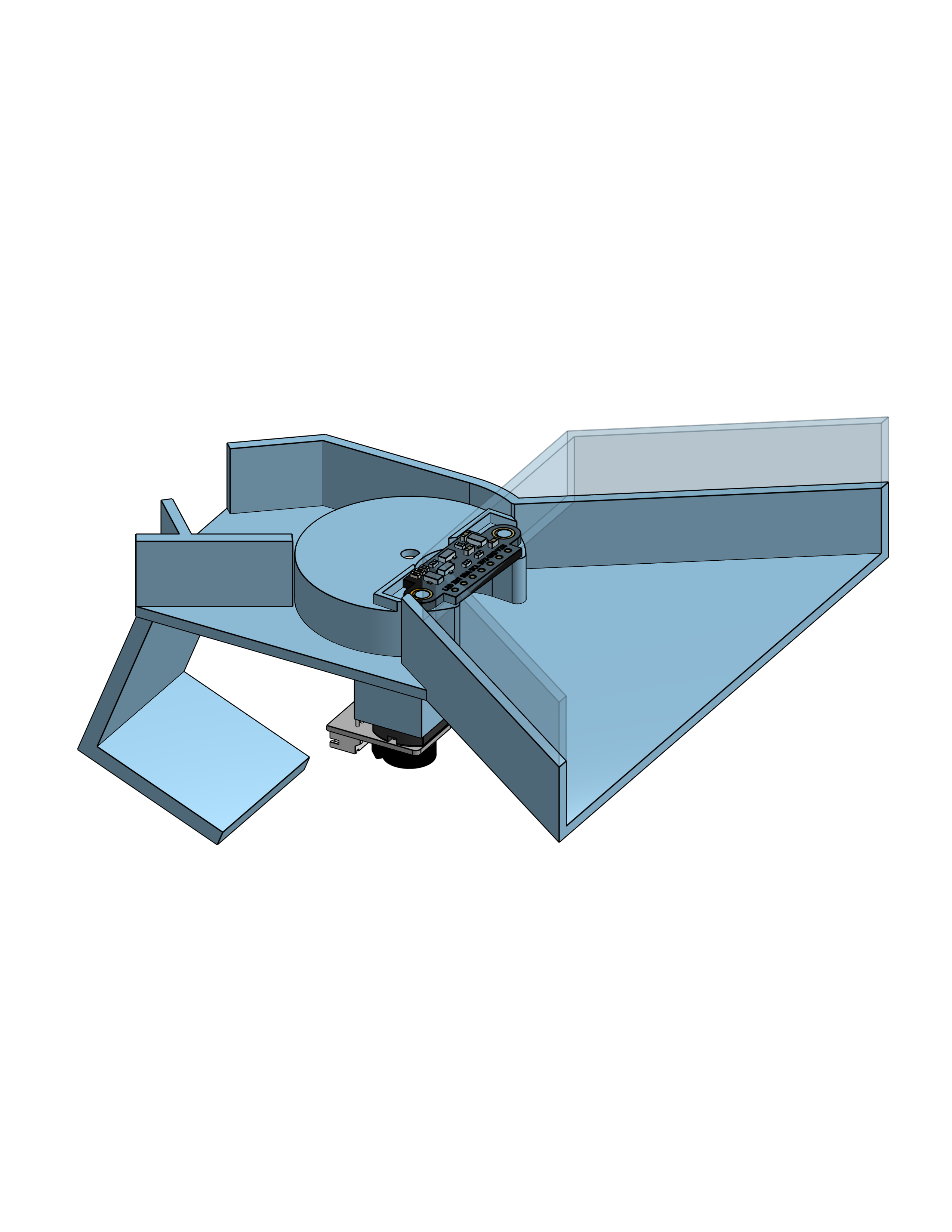
Autonomous Scavenger Robot (Sorting System)
Rotary gate meters one pebble at a time—reverses on green to drop into the good bin.
Quick calibration learns RGB range from three green samples, robust to lighting. Group project; I owned sorting system design/build/code.
Continuous Mechanical Iris (Sinusoidal Cam)
Sinusoidal cam groove drives follower pins for smooth open/close with continuous rotation.
Parametric model with printable blades/ring and low-friction pivots. Tune amplitude/phase for different aperture motion.
4-Bar Linkage Tester
Modular rig to prototype 4-bar motions fast. Swap links, slide input gear, iterate quickly.
Supports many link lengths. Demo shows crank-rocker: s=3, l=6, p=6, q=5.
